
-
Propulsion spatiale inertielle

- Réducteur à engrenages magnétiques
- Transformation du mouvement
- Micro-turbine économique
- Transmission gyroscopique à vitesse continuement variable
- Moteur pompe à rotor sphérique fraisoïdal
- Propulsion spatiale inertielle
- Systèmes de captation du CO²
- Le nouveau système SKF réduit la consommation d'huile
- Production of drinking water and electricity by wind turbine
- The hyperloop transportation system
- Edition
-
Propulsion spatiale inertielle
Source: site web de Bernard BASTITA - http://www.invention-conception.com/
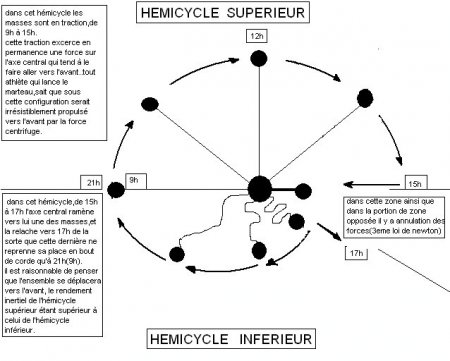
A la recherche d'une force propulsive
Cette première figure représente un athlète imaginaire capable de faire tournoyer huit marteaux.
Nous traçons autour de lui un cercle virtuel gradué en heures et le sens de rotation des marteaux correspond à celui des aiguilles d'une montre.L’ épaule gauche correspond à 9h, l’ épaule droite à 15h ; donc, devant l'athlète (9h, 10h, 11h, 12h, 13h, 14h, 15h).
L'arrière de notre athlète correspond au reste du cadran (15h, 16h, 17h, 18h, 19h, 20h, 21h).
Cette circonférence ainsi créée, notre athlète fait tournoyer ses marteaux de telle sorte qu'entre 15h et 17h, et à leur passage dans cette zone, chacun de ces derniers soit ramené vers sa tête pour être relâché à 17h (nous reviendrons plus tard à cette zone).
A 17h , chaque masse est lâchée pour ne reprendre sa place en bout de corde qu'à 21h ( 9h).
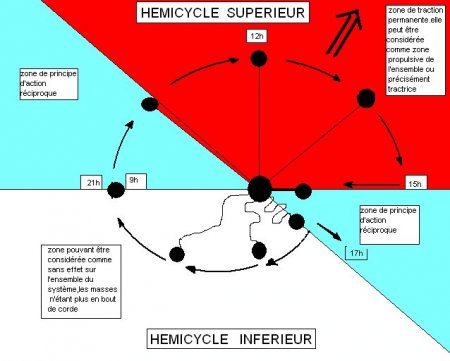
On peut donc constater que dans cette zone là, les masses, avec leur temps de retour en traction, sont totalement indépendantes de l'axe moteur central que constitue l'athlète.Dans le même temps on peut constater que ce même athlète doit supporter en permanence une traction due au fait que la zone (9h, 10h, 11h, 12h, 13h, 14h, 15h) est, elle, en traction continue.
Le déficit de traction dans un hémicycle et le bilan positif de traction dans l'autre hémicycle fait que l'ensemble est propulsé vers l'avant.Maintenant revenons à la zone 15h 17h.
Il est évident que pour ramener la masse de passage dans la zone vers sa tête l'athlète fournit une force qu'il faut soustraire à l'ensemble ( 3ème loi de Newton); mais que cette zone pour l'exemple a été volontairement surdimentionnée pour des fins de compréhensibilité.
La technique permet de la réduire et ainsi de pouvoir réduire son effet sur le dispositif.
Je tiens toutefois à signaler par avance que l’objet de l'exemple proposé à votre lecture servira de référence en termes de zones, nombre de tiges coulissantes ainsi que principe.
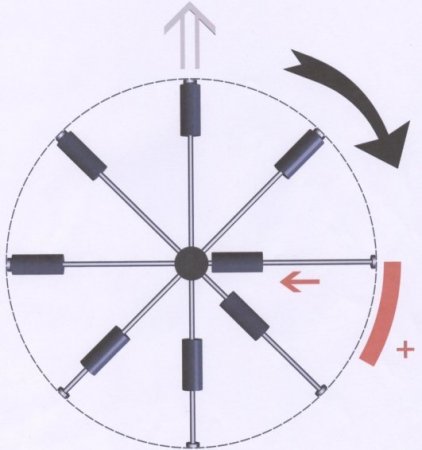
Vue plane d'un demi-process
Représentation d'un demi-process, dépouillé de tout moteur et générateur électrique.
Il peut être directement mis en relation avec les dessins supérieurs en ce qui concerne l'application de la force exploitée dans le process.
Afin d'éviter toute confusion il n'est pas inutile de rappeler que l'électro-aimant représenté ne sert qu'à renvoyer les masses mobiles positives vers l'axe, puis à les relâcher.
En aucune façon cet électro-aimant ne participe à une quelconque rotation du système. Il est fixe et la rotation des masses mobiles est assurée par un moteur axial (axe moteur).
Comme dans les précédents dessins on peut voir une traction importante des masses en butée transmises à l'ensemble de l'hémicycle supérieur ; alors que dans l'hémicycle inférieur les masses ne sont en appui sur rien et peuvent, pendant leur temps de retour en butée, être considérées comme indépendantes et sans effet sur le reste du système.
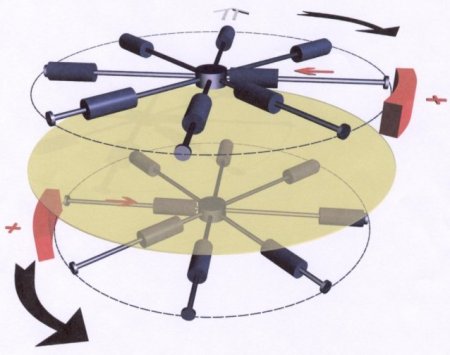
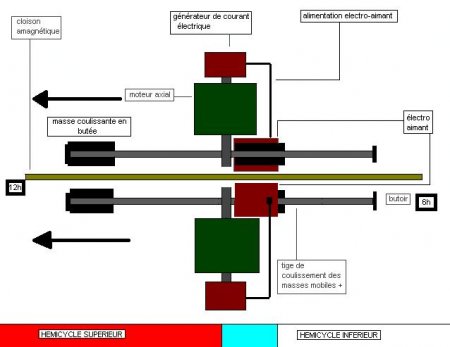
Dispositif de contrarotation
Ce schéma utilise les mêmes principes que les dessins et textes précédents.
La contrarotativité de ce dernier est destinée à équilibrer les forces de façon à assurer à l'ensemble une poussée rectiligne.
Dans cette infographie il est fait abstraction du système moteur assurant la rotation axiale ainsi que des générateurs électriques alimentant les électro-aimants. Y figure également un système de cloison amagnétique destiné à minimiser l'influence d'un système sur l'autre.
Comme dans les précédents dessins, on peut constater le découplage des forces (hémicycle inférieur <--> hémicycle supérieur), avec un bilan positif pour le dernier où les masses sont en permanence en traction sur tige et butée.
Représentation schématique d'un process contrarotatif complet
Elle est complémentaire de l'infographie précédente.
Il y est montré les générateurs ainsi que les moteurs volontairement surdimensionnés pour des fins de compréhensibilité.
Il est à noter au passage que du début à la fin de cette présentation, le process n'a utilisé que 8 tiges de coulissement, mais que rien n'empêche d'en monter un nombre supérieur.
Dans la même vision, il est tout à fait possible d'empiler des process de façon à accroître la poussée.
La configuration présentée n'est pas la seule étudiée par notre équipe, d'autres, simplifiées, sont déjà en voie de développement et ne seront pas abordées ici.


Conclusion
Ce dernier schéma représente l' intégration sous carène du groupe moto-propulseur que vous venez de voir en plan et qui n'est lui même qu' une des multiples versions possibles de l'application de ce système.
En effet plusieurs formes et techniques différentes peuvent mettre en oeuvre les principes de ce process. Dans le cas présent ce dernier utilise toutes les techniques mises en oeuvre dans les textes et les dessins précédents. L'empennage aérodynamique figurant sur le dessin n'a que valeur de symbole car, en effet, il est tout à fait technologiquement possible de ne se servir que du process pour se diriger en trois dimensions. Par exemple il suffit de penser que l'ensemble moto-propulseur peut-être monté sur rotule, ce qui permet de le diriger sur les trois dimensions citées.
Des inversions de poussées peuvent également être réalisées en montant l'électro-aimant sur une rampe circulaire rotative. Ce groupe moto propulseur peut-être alimenté par toutes les formes d'énergies existantes actuellement et sa consommation est moindre en comparaison avec la consommation des objets spatiaux utilisés actuellement.
Avec cet objet la possibilité de l'exploration de l'espace profond devient possible grâce à la vitesse qu'il peut atteindre sans consommation excessive. Alimenté par une pile nucléaire sous une simple accélération de 1G pendant 24h, ce qui est actuellement très possible, l'objet serait animé d'une célérité de 964km par seconde. Il est évident que des poussées plus importantes peuvent être mises en oeuvre dans le cadre d'une sonde inhabitée.
Dans le cadre de nos recherches, et pour pouvoir les poursuivre, nous demandons l'aide de partenaires ou de sponsors. Notre équipe est en mesure de pouvoir réaliser un véhicule habité, dont les essais après financement pourraient avoir lieux dans les deux ans suivant le commencement des travaux. Nous sommes convaincus que l'objet présenté est du plus grand intérêt pour la propulsion spatiale à venir, et que toute implication en ce sens ne pourrait donner que des résultats positifs à tout investisseur potentiel.
CE SYSTEME FAIT L’ OBJET D’ UN BREVET DEPOSE A L INPI...